【Raspberry Pi】MPU-6050から加速度とジャイロと気温データを取得(Python編)
shizenkarasuzon.hatenablog.com
↑の記事のRaspberry Piバージョンです。
この記事では、MPU6050から加速度とジャイロの計測データを取得して、それをディスプレイに表示するところまでを行います。
それ以降の内容(角度算出etc.)は、別の記事に書いていくつもりです。
ハードウェア
以下の四本を接続してください。
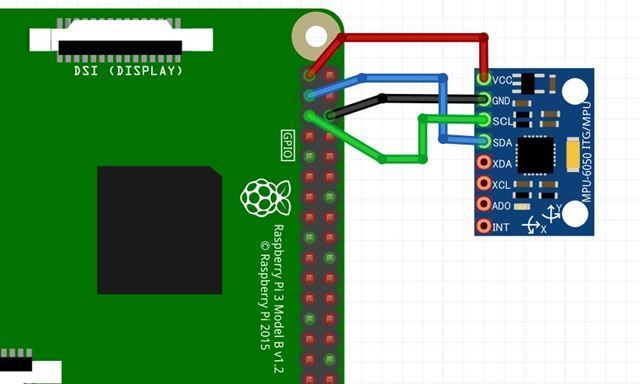
| ラズパイピン番号 | MPU6050 |
| 1pin | VCC |
| 3pin | SDA |
| 5pin | SCL |
| 6pin | GND |
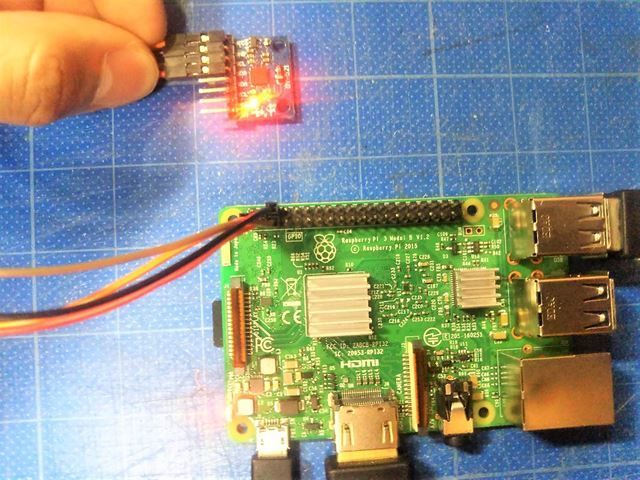
上のようにつなぐと、MPU6050に電力が供給され、MPU6050上の赤色LEDが光ります。
下準備(raspy-config)
MPU-6050とRaspberry Piの通信には、「I2C」という通信規格を使用します。
そのためには、「raspy-config」を使った設定が必要です。
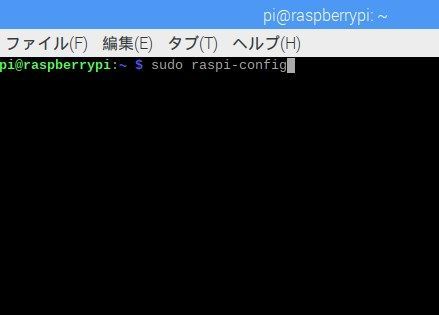
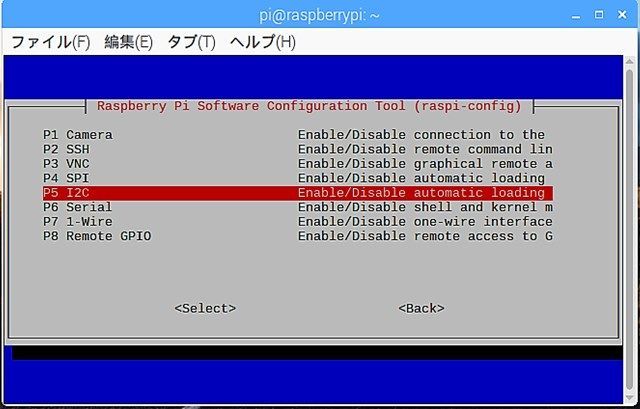
まず、プロンプトで「sudo raspi-config」と打ち込みます。
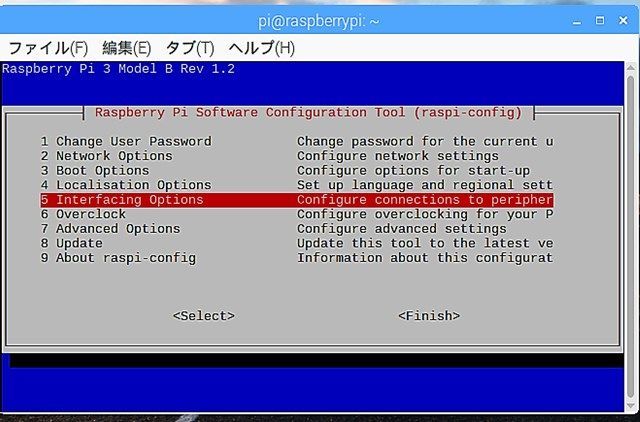
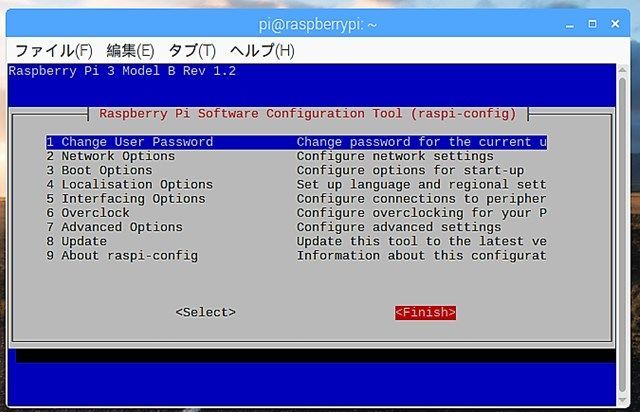
以下のような画面に変わるので「Interface Options」→「I2C」の順に選択します。
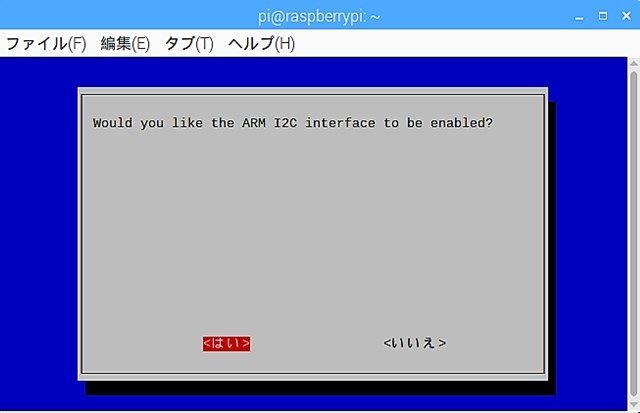
そして「I2Cを有効化しますか?」と聞かれるので(下画像)「<はい>」→「<了解>」を選択します。
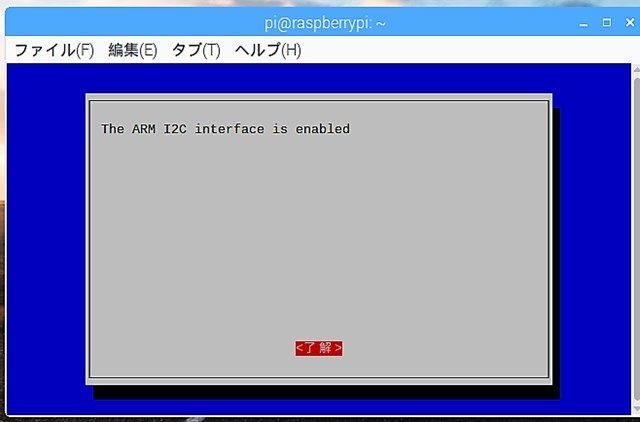
この後、再起動すればI2Cが有効になっています。
I2Cの動作確認
上の方法でI2Cが有効化されているのかを確かめるには、
gpio readall
を実行してください。
上のコマンドを実行すると、全てのGPIOピンの状態を取得できます。

I2C通信に使われるピンは3ピン(SDA)と5ピン(SCL)ですが、I2CがOFFの時はどちらも「GPIO」として機能しています。
しかし、I2CがONになるとそれぞれ「SDA」や「SCL」というI2C通信用のピンとして設定されるので、ピンの状態を見ることでI2Cが有効になっているかがわかるのです。
以下のコマンドを実行すると、現在I2Cを使って接続されているデバイスのアドレスが一覧表示されます。
sudo i2cdetect -y 1
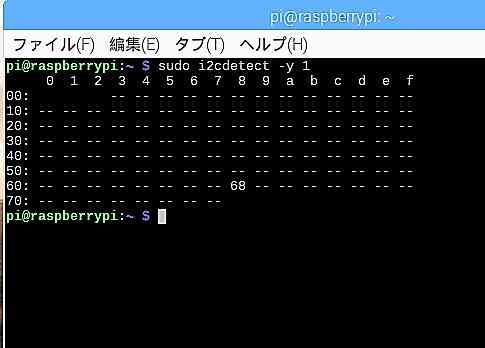
MPU-6050のアドレスは「0x68」なので、正常に認識されています。
プログラム
以下のプログラムを実行してください。
# -*- coding: utf-8 -*- import smbus import math from time import sleep import time DEV_ADDR = 0x68 ACCEL_XOUT = 0x3b ACCEL_YOUT = 0x3d ACCEL_ZOUT = 0x3f TEMP_OUT = 0x41 GYRO_XOUT = 0x43 GYRO_YOUT = 0x45 GYRO_ZOUT = 0x47 PWR_MGMT_1 = 0x6b PWR_MGMT_2 = 0x6c bus = smbus.SMBus(1) bus.write_byte_data(DEV_ADDR, PWR_MGMT_1, 0) def read_word(adr): high = bus.read_byte_data(DEV_ADDR, adr) low = bus.read_byte_data(DEV_ADDR, adr+1) val = (high << 8) + low return val def read_word_sensor(adr): val = read_word(adr) if (val >= 0x8000): return -((65535 - val) + 1) else: return val def get_temp(): temp = read_word_sensor(TEMP_OUT) x = temp / 340 + 36.53 # data sheet(register map)記載の計算式. return x def getGyro(): x = read_word_sensor(GYRO_XOUT)/ 131.0 y = read_word_sensor(GYRO_YOUT)/ 131.0 z = read_word_sensor(GYRO_ZOUT)/ 131.0 return [x, y, z] def getAccel(): x = read_word_sensor(ACCEL_XOUT)/ 16384.0 y= read_word_sensor(ACCEL_YOUT)/ 16384.0 z= read_word_sensor(ACCEL_ZOUT)/ 16384.0 return [x, y, z] while 1: ax, ay, az = getAccel() gx, gy, gz = getGyro() # 下の文が間違っており、全てgxが出力されていたので修正いたしました。 print ('{:4.3f},{:4.3f},{:4.3f},{:4.3f},{:4.3f},{:4.3f},' .format(gx, gy, gz, ax, ay, az))
実行結果
ディスプレイ上に、センサーから取得した3軸加速度の値と3軸角速度の値がリアルタイムで表示されるはずです。

解説
MPU-6050について
こちらをご覧ください。
shizenkarasuzon.hatenablog.com
I2Cデバイスの使い方
そもそも、「I2C」とは通信規格の一種をさします。「SPI」とか「USART」とかと同じようなものです。
Raspberry PiでI2Cデバイスを使うプログラムについて簡単に紹介します。
I2C通信を行うには、「smbus(System Management Bus)」というライブラリが必要です。
https://raspberry-projects.com/pi/programming-in-python/i2c-programming-in-python/using-the-i2c-interface-2
まだインストールしていない場合は、
sudo apt-get install python-smbus
を行ってください。
下準備
プログラムを書く前に、「sudo pi-config」でI2Cを有効化します。
また、「gpio readall」を実行し、目的のI2Cデバイスのアドレスを確認しておきます。
接続
#ライブラリを読み込む import smbus #SMBusオブジェクトを作成 bus = smbus.SMBus(1) # 0 = /dev/i2c-0 (port I2C0), 1 = /dev/i2c-1 (port I2C1)
上のプログラムの smbus.SMBus(1) でI2C通信を開始します。
Raspberry Piには、2つのI2Cポートがあり、I2C0を使う場合は引数に「0」を指定し、I2C1を使う場合は引数に「1」を指定します。