【Raspberry Pi】MPU-6050を使って姿勢角算出(Python編)
この記事の内容
前回、MPU-6050を使って加速度とジャイロの計測データを取得して、それをディスプレイに表示しました。
shizenkarasuzon.hatenablog.com
今回は、そうして得られた値から姿勢角(ピッチ角とロール角)を算出してみます。
ハードウェア
以下の四本を接続してください。
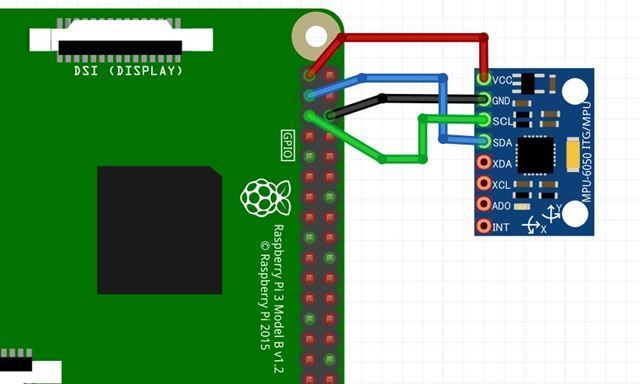
| ラズパイピン番号 | MPU6050 |
| 1pin | VCC |
| 3pin | SDA |
| 5pin | SCL |
| 6pin | GND |
上のようにつなぐと、MPU6050に電力が供給され、MPU6050上の赤色LEDが光ります。
プログラム
# -*- coding: utf-8 -*- import smbus import math from time import sleep DEV_ADDR = 0x68 ACCEL_XOUT = 0x3b ACCEL_YOUT = 0x3d ACCEL_ZOUT = 0x3f TEMP_OUT = 0x41 GYRO_XOUT = 0x43 GYRO_YOUT = 0x45 GYRO_ZOUT = 0x47 PWR_MGMT_1 = 0x6b PWR_MGMT_2 = 0x6c bus = smbus.SMBus(1) bus.write_byte_data(DEV_ADDR, PWR_MGMT_1, 0) def read_word(adr): high = bus.read_byte_data(DEV_ADDR, adr) low = bus.read_byte_data(DEV_ADDR, adr+1) val = (high << 8) + low return val # Sensor data read def read_word_sensor(adr): val = read_word(adr) if (val >= 0x8000): # minus return -((65535 - val) + 1) else: # plus return val def get_temp(): temp = read_word_sensor(TEMP_OUT) x = temp / 340 + 36.53 # data sheet(register map)記載の計算式. return x def getGyro(): x = read_word_sensor(GYRO_XOUT)/ 131.0 y = read_word_sensor(GYRO_YOUT)/ 131.0 z = read_word_sensor(GYRO_ZOUT)/ 131.0 return [x, y, z] def getAccel(): x = read_word_sensor(ACCEL_XOUT)/ 16384.0 y= read_word_sensor(ACCEL_YOUT)/ 16384.0 z= read_word_sensor(ACCEL_ZOUT)/ 16384.0 return [x, y, z] while 1: ax, ay, az = getAccel() gx, gy, gz = getGyro() #print ('{:4.3f},{:4.3f}, {:4.3f}, {:4.3f},{:4.3f}, {:4.3f},' .format(gx, gy, gz, ax, ay, az)) roll = math.atan(ay/az) * 57.324 pitch = math.atan(-ax / math.sqrt( ay* ay+ az*az ) ) * 57.324 #pitch = math.atan(-ax / (ay*math.sin(roll) + az*math.cos(roll))) # ↓のprint()分が間違っていたため修正いたしました。申し訳ありません print('{:4.3f}, {:4.3f},' .format(pitch, roll))

姿勢角の算出方法
姿勢角は以下の方法で算出しています。
姿勢角には、Pitch(ピッチ)、Roll(ロール)、Yaw(ヨー)の3種類があります。
この記事では、ピッチ角とロール角を求めてみます。
それぞれ、以下の数式で表すことができます。
ロール角について
ピッチ角について
、
、
はそれぞれ、
軸、
軸、
軸の加速度を表します。
この部分をArduinoのプログラムに実装すると、このようになります。
roll = math.atan(ay/az) * 57.324 pitch = math.atan(-ax / math.sqrt( ay* ay+ az*az ) ) * 57.324
57.324というのは、で、弧度法(rad)の数値を度数法(°)に変更にするのに使用しています。